Temporal consistency in action
The biggest win is stability over time. The naïve frame-by-frame baseline flickers, while adding the ConvGRU geometry filter, and then fine-tuning it, gives noticeably steadier segmentation across the whole clip.
Tip: click any clip to replay it from the start.
Segmentation, sequence 0


Segmentation, sequence 1



Segmentation, sequence 2


Segmentation, sequence 3



Segmentation, sequence 4


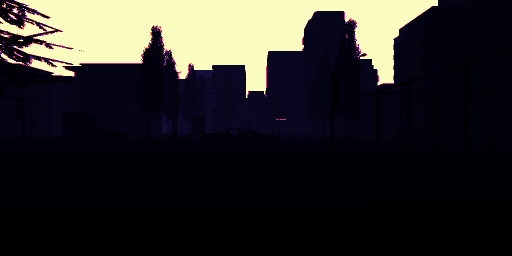
Depth target maps
These show the depth that the model was trained to recover, with closer surfaces shown lighter and far-away ones darker. The model's own depth head turned out to be the weakest part of the system, so we show the target maps here and let the point clouds below carry the depth story.

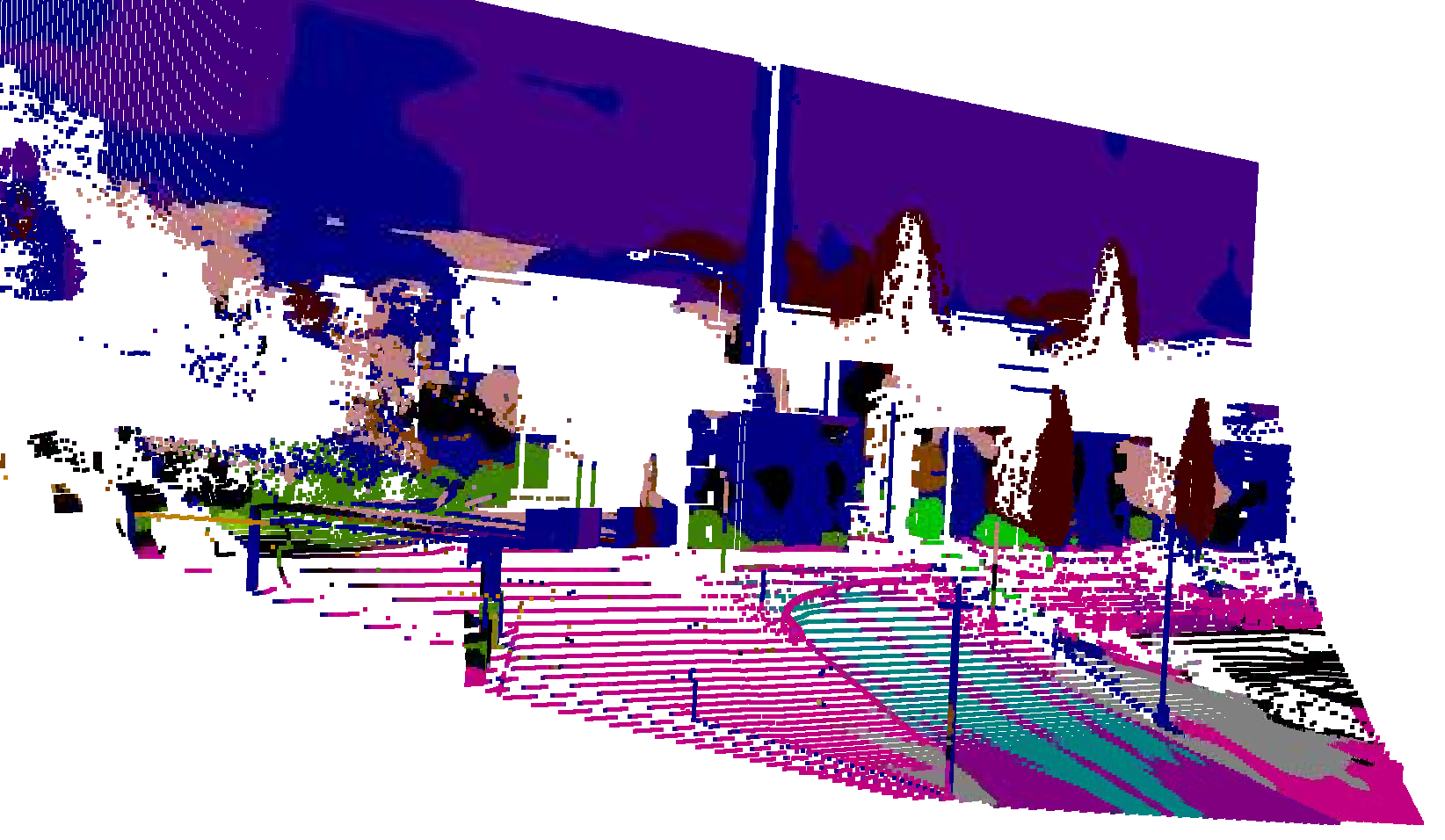
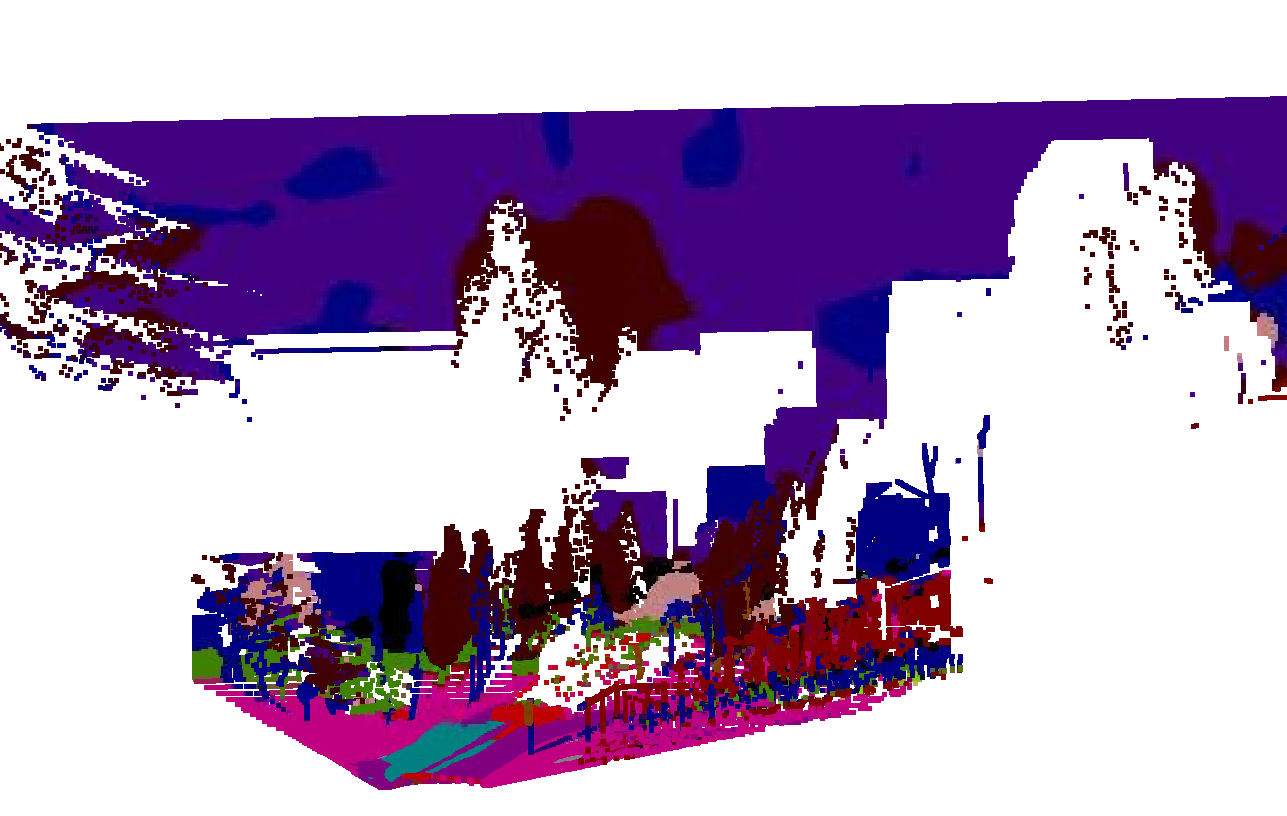
3D point-cloud reconstruction
Depth lifted into 3D and coloured by predicted semantic class, then placed in the scene using the estimated camera poses.
Quantitative evaluation (test set, Town 02)
| Metric | Value | Notes |
|---|---|---|
| Pixel accuracy | 83.69% | Per-pixel, averaged over the test set |
| mean IoU | 0.3575 | Averaged across the 22 classes |
| Average loss | 0.5585 | Mean of segmentation + depth loss over the test set |
These are the exact numbers reported by the evaluation in demonstration.ipynb. For reference, the loss terms on the very last evaluation batch read about 0.514 for segmentation, 0.00007 for depth, and 3.01 for camera pose. The camera-pose term is tracked separately and is not part of the average loss above.