Load Data and Show Some Samples¶
In [ ]:
import torch
from datasets import SequenceDataset
from torchvision.transforms import v2, InterpolationMode
from modules.ego_motion_filter import EgoMotionFilter
from modules.geometry_filter import GeometryFilter
from modules.segmentation_model import SegmentationModel
from modules.identity import Identity
import util
import sequence_segmenter
from visualizations.save_gif import save_tensors_as_gif
import numpy as np
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(device)
cuda
In [ ]:
root_dir = "/home/nfs/inf6/data/datasets/Carla_Moritz/SyncAngel3/"
transforms = v2.Compose([
v2.Resize((256, 512), InterpolationMode.BILINEAR, antialias=False),
v2.ToDtype(torch.float, scale=True),
])
test_dataset = SequenceDataset(root_dir, transform=transforms, split='test')
test_loader = torch.utils.data.DataLoader(test_dataset, batch_size=8, shuffle=True, num_workers=4)
Show Some Samples¶
In [ ]:
import visualizations.segmentation_utils as segmentation_utils
import matplotlib.pyplot as plt
image, seg, depth, position = next(iter(test_loader))
#image, seg, depth = image[0,0,...], seg[0,0,...], depth[0,0,...]
In [ ]:
positions_list = torch.unbind_copy(position[0][0:6], 0)
positions_list = [p.numpy() for p in positions_list]
In [ ]:
from visualizations.visualize_camera_poses import visualize_camera_positions
In [ ]:
visualize_camera_positions(positions_list)
initialize camera pose visualizer

In [ ]:
fig, ax = plt.subplots(1, 4)
fig.set_size_inches(18, 5)
for i in range(4):
ax[i].imshow(image[i][0].cpu().permute(1,2,0))
ax[i].axis("off")
plt.tight_layout()
plt.show()

Load pretrained model¶
In [ ]:
geometry_filter = GeometryFilter(use_cuda=True).to(device)
ego_motion = EgoMotionFilter().to(device)
#util.load_model('models/finetune_ep_0.pth', geometry_filter=geometry_filter, ego_motion=ego_motion)
util.load_model('models/sequence_ep_6.pth', geometry_filter=geometry_filter, ego_motion=ego_motion)
naive_model = SegmentationModel(Identity())
checkpoint = torch.load('models/checkpoint_epoch_10.pth')
naive_model.load_state_dict(checkpoint['model_state_dict'])
naive_model.to(device)
del checkpoint
Display the Structure¶
In [ ]:
geometry_filter.eval()
Out[ ]:
GeometryFilter(
(backbone): IntermediateLayerGetter(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(4, 4), dilation=(4, 4), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(4, 4), dilation=(4, 4), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
)
(ConvRNN): ConvGRUCell(
(conv_gates): Conv2d(4096, 4096, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(conv_can): Conv2d(4096, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(segmenter): DeepLabHead(
(0): ASPP(
(convs): ModuleList(
(0): Sequential(
(0): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(1): ASPPConv(
(0): Conv2d(2048, 256, kernel_size=(3, 3), stride=(1, 1), padding=(12, 12), dilation=(12, 12), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(2): ASPPConv(
(0): Conv2d(2048, 256, kernel_size=(3, 3), stride=(1, 1), padding=(24, 24), dilation=(24, 24), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(3): ASPPConv(
(0): Conv2d(2048, 256, kernel_size=(3, 3), stride=(1, 1), padding=(36, 36), dilation=(36, 36), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(4): ASPPPooling(
(0): AdaptiveAvgPool2d(output_size=1)
(1): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(3): ReLU()
)
)
(project): Sequential(
(0): Conv2d(1280, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): Dropout(p=0.5, inplace=False)
)
)
(1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(3): ReLU()
(4): Conv2d(256, 22, kernel_size=(1, 1), stride=(1, 1))
)
(depth_head): DepthDecoder(
(conv1): Conv2d(2048, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv2): Conv2d(384, 384, kernel_size=(1, 1), stride=(1, 1))
(bn2): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv3): Conv2d(384, 1, kernel_size=(1, 1), stride=(1, 1))
)
)
In [ ]:
ego_motion.eval()
Out[ ]:
EgoMotionFilter(
(motion_estimator): MotionEstimator(
(layer1): Sequential(
(0): Conv2d(4096, 1024, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(layer2): Sequential(
(0): Conv2d(1024, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(layer3): Sequential(
(0): Conv2d(256, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(avg_pooling): AvgPool2d(kernel_size=(4, 8), stride=(4, 8), padding=0)
(fc1): Linear(in_features=128, out_features=128, bias=True)
(bn): BatchNorm1d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(rnn): GRUCell(128, 128)
(camera_head): CameraHead(
(fc1): Linear(in_features=128, out_features=128, bias=True)
(bn): BatchNorm1d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(fc2): Linear(in_features=128, out_features=6, bias=True)
)
)
Statistics¶
In [ ]:
from util import count_model_params
count_model_params(geometry_filter)
Out[ ]:
273359575
In [ ]:
count_model_params(ego_motion)
Out[ ]:
40540550
Qualitative results¶
Frame-By-Frame Baseline¶
In [ ]:
# Show results on at least 5 sequences
pred_segs = sequence_segmenter.process_video_framewise(image, naive_model, device)
In [ ]:
#Sequence 1
for i in range(5):
save_tensors_as_gif(pred_segs[i], f'images/naive_seg_{i}.gif', segmentation=True)



End-to-End Approach¶
In [ ]:
# Show results on at least 5 sequences
pred_segs, pred_depths, pred_transforms = sequence_segmenter.process_video(image, model=geometry_filter, ego_motion=ego_motion, device=device)
#Sequence 1
for i in range(5):
save_tensors_as_gif(pred_segs[i], f'images/endtoend_seg_{i}.gif', segmentation=True)
save_tensors_as_gif(pred_depths[i], f'images/endtoend_dep_{i}.gif')





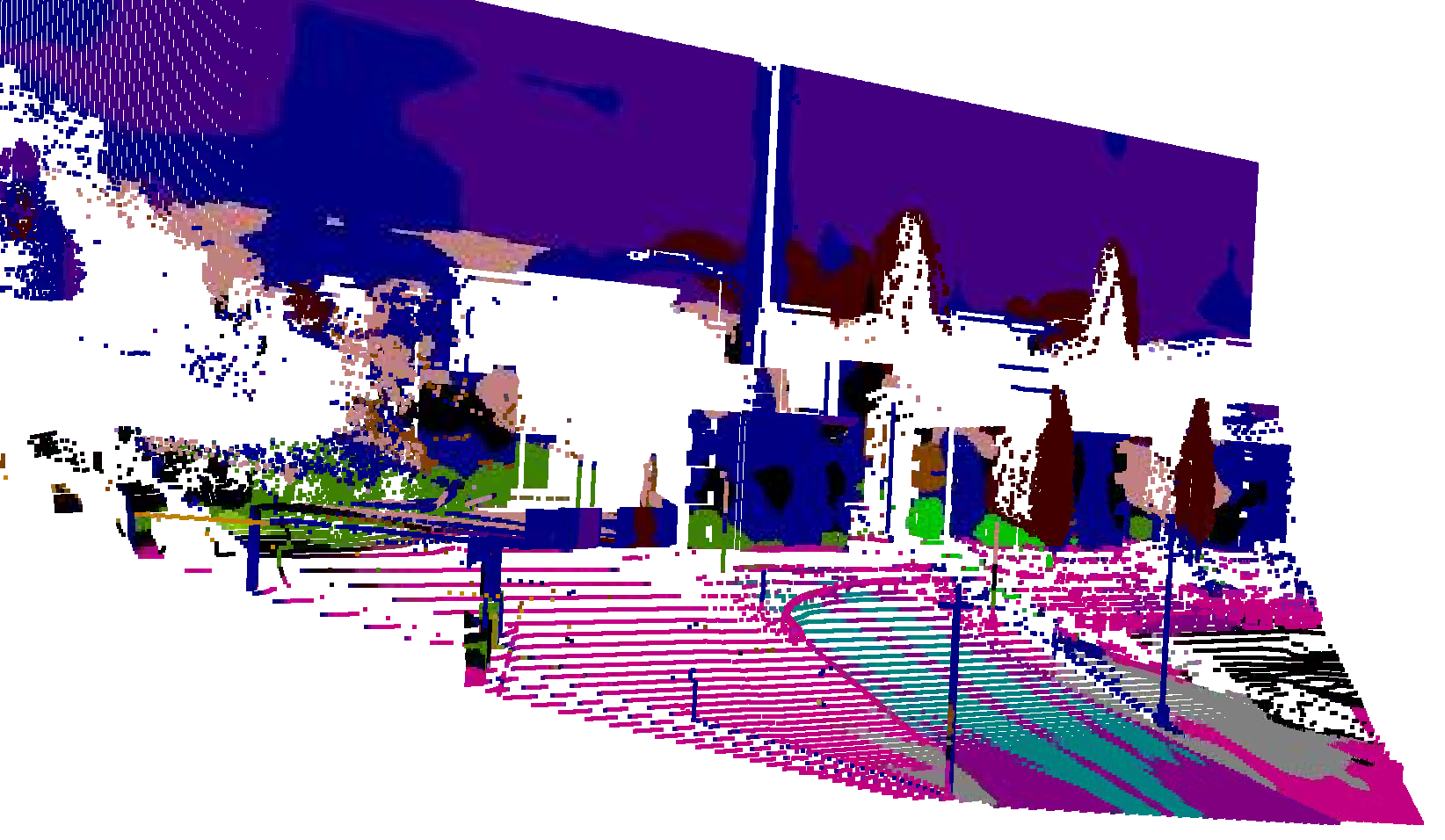
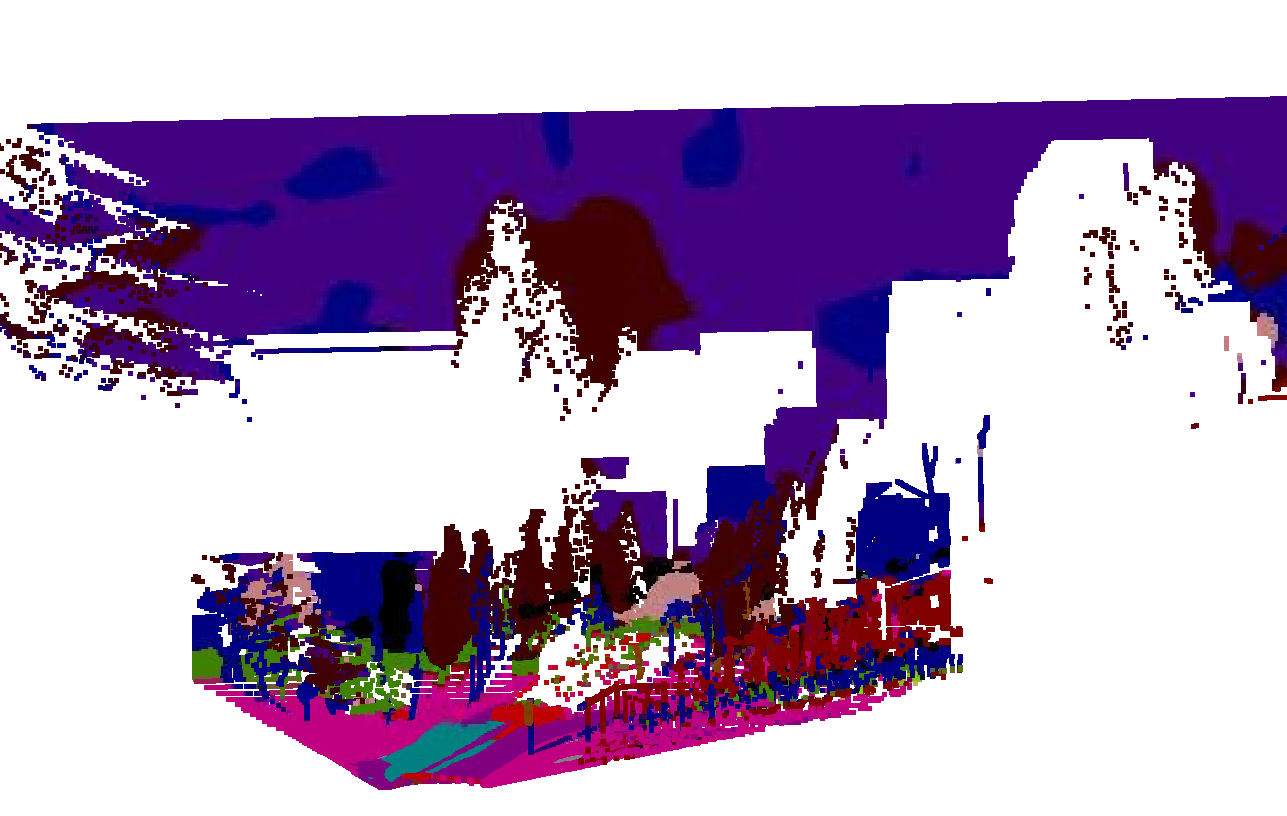
RGB and Semantic Point Clouds¶
First we export the needed depth, segmentations, and RGB
In [ ]:
from visualizations.save_image import save_image
from visualizations.segmentation_utils import draw_segmentation_map
from imageio import imsave
# Visualize RGB and semantic point-clouds (use depth, camera poses and intrinsics)
np.save('export/depth1', pred_depths[0][0].cpu().permute(1,2,0).numpy().squeeze())
np.save('export/depth2', pred_depths[1][0].cpu().permute(1,2,0).numpy().squeeze())
imsave('export/seg1.jpg', draw_segmentation_map(pred_segs[0][0].softmax(dim=-3)))
imsave('export/seg2.jpg', draw_segmentation_map(pred_segs[1][0].softmax(dim=-3)))
save_image(image[0][0], 'export/rgb1.jpg')
save_image(image[1][0], 'export/rgb2.jpg')
np.save('export/depth1a', depth[0][0].cpu().permute(1,2,0).numpy().squeeze())
np.save('export/depth2a', depth[1][0].cpu().permute(1,2,0).numpy().squeeze())
Honestly, our depth head wasn't particularly effective, so we provide here the segmantic point cloud with the given depth data
Visualizing Cramera Poses¶
In [ ]:
from visualizations.visualize_camera_poses import visualize_camera_transformations
visualize_camera_transformations([p.cpu().numpy() for p in pred_transforms[0].unbind()])
initialize camera pose visualizer

In [ ]:
visualize_camera_transformations([p.cpu().numpy() for p in pred_transforms[1].unbind()])
initialize camera pose visualizer

In [ ]:
visualize_camera_transformations([p.cpu().numpy() for p in pred_transforms[2].unbind()])
initialize camera pose visualizer

Quantitative evaluation¶
In [ ]:
from sequence_trainer import eval_model
loss, (avg_accuracy, mIoU) = eval_model(
model=geometry_filter, ego_motion=ego_motion, eval_loader=test_loader,
device=device, epoch=1, writer=None)
print(f'Average loss: {loss}, Average accuracy: {avg_accuracy}, Average IoU {mIoU}')
Epoch 2: seg_loss 0.51351, depth_loss 0.00007, pos_loss 3.01249: 100%|██████████| 188/188 [12:48<00:00, 4.09s/it]
Average loss: 0.5584785222930682, Average accuracy: 83.6943835788303, Average IoU 0.3575233221054077